


СОС предназначена для:
- гашения начальной угловой скорости, полученной НС после отделения от РН и ориентации НС в орбитальной системе координат;
- обеспечения трехосной ориентации НС с заданной точностью;
- определения ориентации НС относительно Солнца и Земли в штатном/дежурном режиме;
- Определения географического положения НС на орбите.
Характеристики СОС:
- точность ориентации по тангажу и крену не хуже - 5°, по рысканью - 2°;
- точность определения ориентации по тангажу, крену и рысканью не хуже - 1°;
- погрешность определения навигационных параметров не более:
- места: - 5 м (типовое значение ~2 м);
- высоты: - 8 м (типовое значение ~3 м);
- времени - 50 нс;
- скорости - 0,1 м/с;
- количество каналов приемника системы навигации НС – 24;
- срок штатной эксплуатации не менее 1,5 лет.
В НС используется активная магнитная система ориентации и стабилизации.
Состав СОС:
- электромагниты (3 шт.);
- датчики координат Солнца (3 шт., расположены на гранях НС);
- магнитный датчик (1 шт);
- Мини маховик (1 шт.);
- Приёмник GPS/Glonass (1 шт.);
- Антенны GPS/Glonass (2 шт.);
- Электронные гироскопы (2шт.) ;
- Датчик угловой скорости 3-осный цифровой (1 шт.) ;
- Датчик угловой скорости 3-осный аналоговый (1 шт.).
Модуль ADCS (Attitude Determination and Control Subsystem- определения ориентации и управления). Содержит специализированное ПО, в состав которого входят- алгоритмы управления и ориентации, которые используют датчики угловых скоростей, магнитометры, датчики Солнца, приемник GPS/ГЛОНАСС и катушки электромагнитов.
Модуль выполняет следующие задачи
- Определение орбиты методом Гаусса по двум точкам;
- Уточнение орбиты - работа с подсистемой навигации выполняется по заложенной циклограмме;
- точность ориентации 5° по тангажу и крену, а по рысканью не хуже 10°;
- время гашения начальной угловой скорости, полученной НС после отдаления от РН и начальной ориентации НС в орбитальной системе координат не более 420 мин.
Анализ сигналов датчиков и управление исполнительными устройствами подсистемы ориентации выполняет специализированное ПО содержащееся в подсистеме обработки данных.
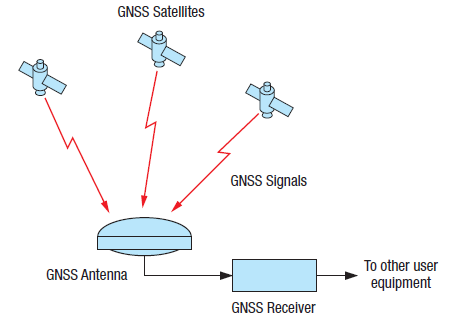
Схема работы радионавигационной системы
![[Image]](/images/content/PolylTAN-2/Systems/ADCS/002.png)
Компьютерный контроль работы системы навигации. Анализ получения навигационных сигналов одновременно с группы навигационных спутников для решения задач навигации.
![[Image]](/images/content/PolylTAN-2/Systems/ADCS/003.png)
Расчёт параметров орбиты и сигналов управления
|
|
|
|
Датчик направления на солнце |
Магнитометр |
![[Image]](/images/content/PolylTAN-2/Systems/ADCS/004.jpg)
![[Image]](/images/content/PolylTAN-2/Systems/ADCS/005.jpg)
![[Image]](/images/content/PolylTAN-2/Systems/ADCS/006.jpg)
Внешний вид электромагнита подсистемы ориентации
Параметры маховика
|
Параметр |
Величина |
|
максимальный создаваемый кинетический момент |
M=0,0135 Н.м.с |
|
Номинальный диапазон скоростей (об/мин) |
N≤6000 |
|
Минимальный шаг изменения скорости |
0,25 об/мин |
|
Максимальный момент вращения |
0,00085 N∙m |
|
Частота команд управления после |
1/16 с 3 с |
|
Остаточный динамический дисбаланс |
0,072 г∙мм |
|
масса (g) |
200 г |
|
размеры |
D=58 мм, L=42 мм |
|
Питание на максимальной скорости, без ускорения, 25ºС (W) |
≤0,2 Вт |
|
Питание в режиме максимального момента двигателя |
≤1,0 Вт |
|
Рабочая температура на опорной плите (ºС) |
- 20°С +50°С |
|
Порты ввода - вывода |
I2C |
|
напряжение питания постоянный ток |
33,5 В |
Щелевой Датчик угловых координат Солнца
Солнечный сенсор предназначен для управления работой системы ориентации и системы терморегулирования спутника.
Принцип действия щелевого сенсора на основе ФЕП
Сенсор предоставляет информацию об угле между нормалью к своей поверхности и направлением к Солнцу. Это возможно благодаря тому, что луч, сформированный при прохождении света через щель мембраны попадается на поверхность фотоэлектрического преобразователя, который состоит из двух каналов. В зависимости от угла между нормалью и направлением к солнцу луч в разной пропорции зажигает каждую с двух половин фотопреобразователя. Согласно этому изменяется отношение падающей световой мощности на этих каналах и изменяется взаимное отношение их токов. Разность этих токов при встречном включении двух каналов приводит к изменению результирующего напряжения на фотопреобразователя, который фиксируется дополнительной электронной схемой и превращается в необходимую для дальнейшей обработки форму.
Параметры сенсора
Точность определения направления на солнце – ± 1°
Максимальный диапазон измеренных углов – ± 70°
Рабочий диапазон измеренных углов – ± 60°
Масса в сборе – не больше 14г
Диапазон рабочих температур – от -60° к + 85°
Габариты – не больше 20х38,5х5 мм
Скорость обновления данных: Больше 10 герц
Каналы: 5 каналов информационных данных
Потребляемая мощность: меньше 10 mA
Напряжение питания: 1.25 В и 3.3 В
радиационная стойкость: мощность облучения 7 МеВ, Т=150 С, продолжительность 3 ч., доза радиации 50 крад Si + 50 крад Si, или 1,67 Э12 ел/см2 + 1,67 Э12 ел/см2, что отвечает условиям пребывания в космосе на протяжении не менее 2 лет. Деградация сенсора составляет меньше 5 % в год.